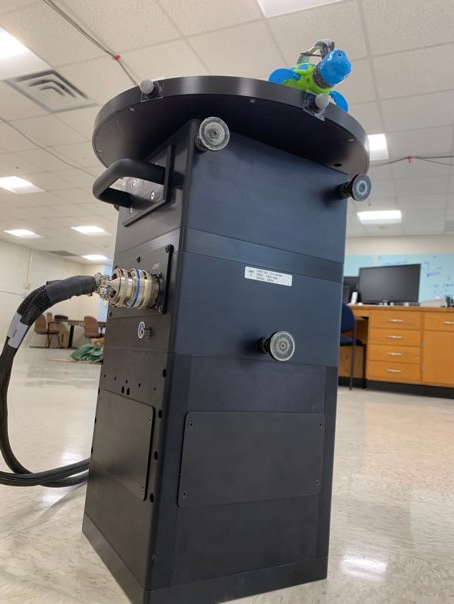
Our lab uses LOTS of tools from computer simulations, to robotics, to computational neuroscience to better understand how animals are able to sense, process, and act based on the magnetic field and other senses. Our goal is to better understand how animals navigate, and to use the principles we learn to develop improved autonomous engineered systems.
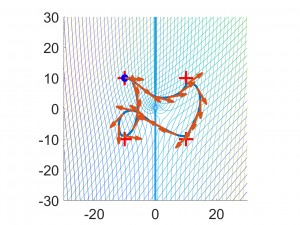
The robot on the left was able to make the trajectory you see on the right with the help of a motion capture system. What’s even better is that this seems to match existing simulation data that we have. When the simulation matches the hardware, it’s a good day!