Image Size
X-Large
Alignment
Center
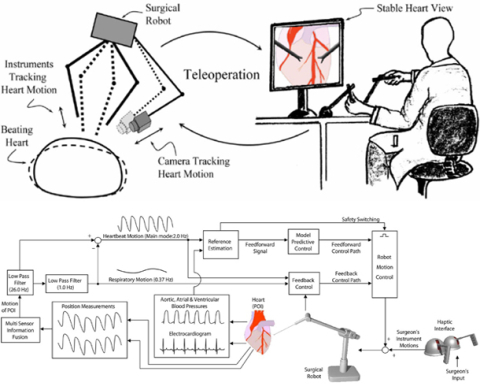
This project focuses on robotic technology that will revolutionize off-pump (beating heart) coronary artery bypass graft (CABG) surgery. In this context, off-pump CABG surgery means that the surgery is done while the heart is still beating instead of using a cardiopulmonary bypass machine and stopping the heart to perform heart surgery. The intelligent telerobotic tools created for this project will actively track and cancel the relative motion between the surgical instruments and the heart by Active Relative Motion Canceling (ARMC), allowing CABG surgeries to be performed on a beating heart with technical perfection equal to traditional on pump procedures.
This is a MeRCIS project under the guidance of Dr. M. Cenk Cavusoglu.